|
Zhixian Hu 胡智娴 I'm a PhD student in Industrial Engineering, Purdue University, under the supervision of Prof. Juan P. Wachs and Prof. Yu She. |

|
EducationCurrent Ph.D. student in Industrial Engineering, in progress, Purdue University. M.Phil. in Computer and Information Engineering, 2022, The Chinese University of Hong Kong, Shenzhen. B.Eng. in Electronic Information Engineering, 2020, The Chinese University of Hong Kong, Shenzhen. |
News[May 2025] I presented our work "a magnetic-actuated vision-based whisker array for contact perception and grasping" at ICRA 2025 in Atlanta, United States. |
ResearchI'm interested in robotic perception and cognition, especially robot tactile sensing. * indicates equal contribution. |
|
Vibrissae-inspired vision-based magnetic-actuated whisker
Zhixian Hu, Yi Cheng, Juan Wachs*, Yu She* Nature Communications, 2026 paper / code / landscape poster / portrait poster / video / bibtex
BibTeX Reference
@article{hu2026vibrissae,
title={Vibrissae-inspired vision-based magnetic-actuated whisker},
author={Hu, Zhixian and Cheng, Yi and Wachs, Juan and She, Yu},
journal={Nature Communications},
volume={17},
pages={939},
year={2026},
publisher={Nature Publishing Group},
doi={10.1038/s41467-025-67672-x}
}
This study presents a vision-based magnetic-actuated whisker array sensor that integrates both tactile sensing and the manipulation of delicate objects. |
|
|
A Magnetic-Actuated Vision-Based Whisker Array for Contact Perception and Grasping
Zhixian Hu, Juan Wachs, Yu She ICRA, 2025 paper / poster / video / bibtex
BibTeX Reference
@inproceedings{hu2025magnetic,
title={A magnetic-actuated vision-based whisker array for contact perception and grasping},
author={Hu, Zhixian and Wachs, Juan and She, Yu},
booktitle={2025 IEEE International Conference on Robotics and Automation (ICRA)},
pages={1--7},
year={2025},
organization={IEEE}
}
This study presents a vision-based magnetic-actuated whisker array sensor that integrates both tactile sensing and the manipulation of delicate objects. |
|

|
Self-Adaptive Perception of Object's Deformability with Multiple Deformation Attributes Utilizing Biomimetic Mechanoreceptors
Waner Lin*, Ziya Wang*, Yingtian Xu, Zhixian Hu, Wenyu Zhao, Zhihao Zhu, Zhenglong Sun, Guoxing Wang, Zhengchun Peng Advanced Materials, 2024 paper / bibtex
BibTeX Reference
@article{lin2024self,
title={Self-Adaptive Perception of Object's Deformability with Multiple Deformation Attributes Utilizing Biomimetic Mechanoreceptors},
author={Lin, Waner and Wang, Ziya and Xu, Yingtian and Hu, Zhixian and Zhao, Wenyu and Zhu, Zhihao and Sun, Zhenglong and Wang, Guoxing and Peng, Zhengchun},
journal={Advanced Materials},
volume={36},
number={9},
pages={2305032},
year={2024},
publisher={Wiley Online Library}
}
This study proposes an innovative design of a tactile sensor that integrates the capabilities of two slow-adapting mechanoreceptors within a soft medium, allowing self-decoupled sensing of local pressure and strain at specific locations within the contact interface. |
|
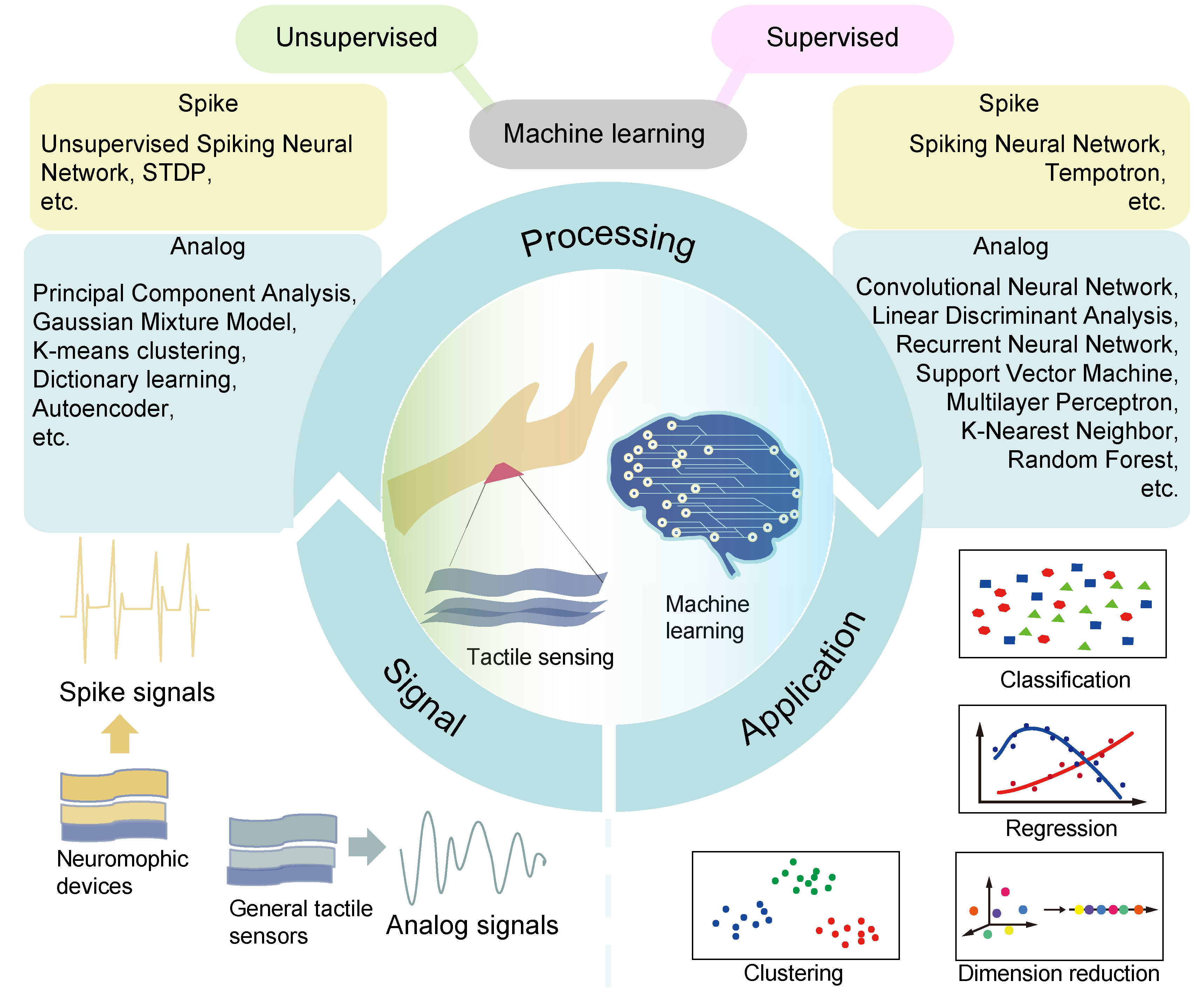
Machine learning for tactile perception: advancements, challenges, and opportunities
Zhixian Hu*, Lan Lin*, Waner Lin, Yingtian Xu, Xuan Xia, Zhengchun Peng, Zhenglong Sun, Ziya Wang Advanced Intelligent Systems, 2023 paper / bibtex
BibTeX Reference
@article{hu2023machine,
title={Machine learning for tactile perception: advancements, challenges, and opportunities},
author={Hu, Zhixian and Lin, Lan and Lin, Waner and Xu, Yingtian and Xia, Xuan and Peng, Zhengchun and Sun, Zhenglong and Wang, Ziya},
journal={Advanced Intelligent Systems},
volume={5},
number={7},
pages={2200371},
year={2023},
publisher={Wiley Online Library}
}
This paper provides a comprehensive review of the advancements, challenges, and opportunities in the field of machine learning for tactile perception. |
|
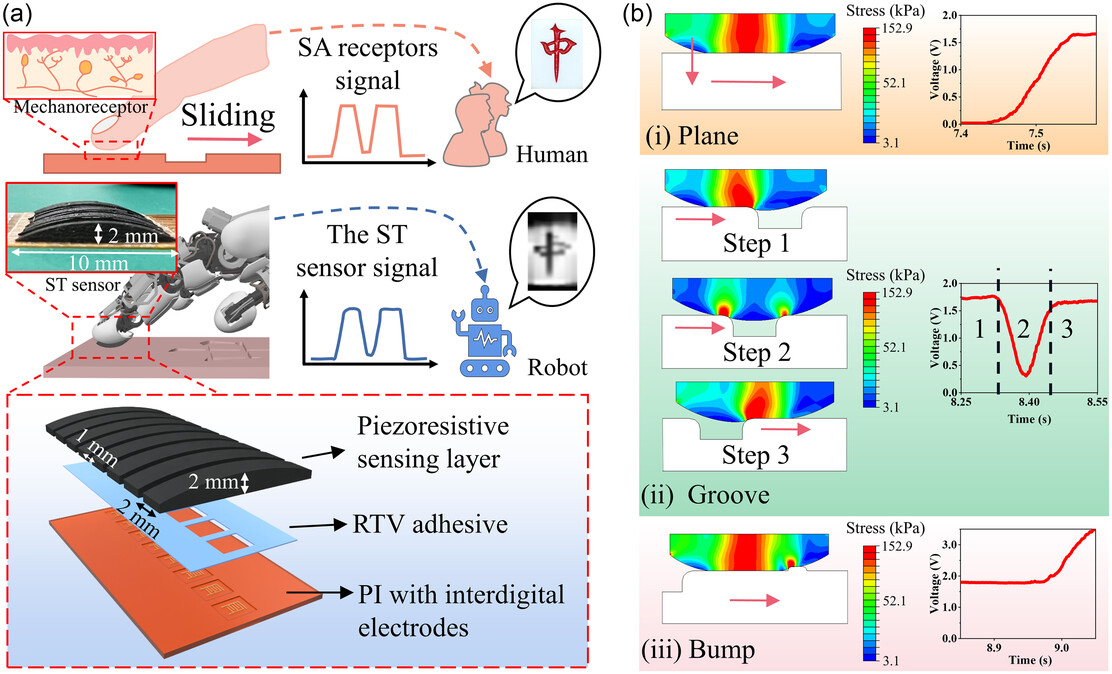
Robust and Flexible Sliding Tactile Sensor for Surface Pattern Perception and Recognition
Zhihao Zhu, Yingtian Xu, Waner Lin, Zhixian Hu, Zhuofan Lin, Zhenglong Sun, Zhengchun Peng, Ziya Wang Advanced Intelligent Systems, 2023 paper / bibtex
BibTeX Reference
@article{zhu2023robust,
title={Robust and flexible sliding tactile sensor for surface pattern perception and recognition},
author={Zhu, Zhihao and Xu, Yingtian and Lin, Waner and Hu, Zhixian and Lin, Zhuofan and Sun, Zhenglong and Peng, Zhengchun and Wang, Ziya},
journal={Advanced Intelligent Systems},
volume={5},
number={10},
pages={2300225},
year={2023},
publisher={Wiley Online Library}
}
This paper presents a soft sliding tactile sensor that enables high-accuracy 3D surface recognition using low-density arrays and deep learning. |
|
Augmented Pointing Gesture Estimation for Human-Robot Interaction
Zhixian Hu, Yingtian Xu, Waner Lin, Ziya Wang, Zhenglong Sun ICRA, 2022 paper / bibtex
BibTeX Reference
@inproceedings{hu2022augmented,
title={Augmented pointing gesture estimation for human-robot interaction},
author={Hu, Zhixian and Xu, Yingtian and Lin, Waner and Wang, Ziya and Sun, Zhenglong},
booktitle={2022 International Conference on Robotics and Automation (ICRA)},
pages={6416--6422},
year={2022},
organization={IEEE}
}
This paper propose an augmented pointing gesture estimation method to enable richer and programmable instructions to be given to the robots. |
|

|
Collaborative Object Transportation by Multiple Robots with Onboard Object Localization Algorithm
Zhixian Hu*, Zhixiang Zhao*, Lianxin Zhang, Hengli Liu, Ning Ding, Zhenglong Sun, Tin Lun Lam, Huihuan Qian ROBIO, 2019 paper / bibtex
BibTeX Reference
@inproceedings{hu2019collaborative,
title={Collaborative object transportation by multiple robots with onboard object localization algorithm},
author={Hu, Zhixian and Zhao, Zhixiang and Zhang, Lianxin and Liu, Hengli and Ding, Ning and Sun, Zhenglong and Lam, Tin Lun and Qian, Huihuan},
booktitle={2019 IEEE International Conference on Robotics and Biomimetics (ROBIO)},
pages={2344--2350},
year={2019},
organization={IEEE}
}
This paper presents a multi-robot leader-follower system with onboard object localization for collaborative object transport and trajectory tracking. |
Teaching
[Spring 2026] Teaching Assistant, IE574, Purdue University
|
Experience[Jun-Aug 2020] Product intern at Ubtech Robotics, Shenzhen, China. |
|
Website template from Jon Barron's website. |